



г. Москва Раменский бульвар 1 («Кластер Ломоносов»)
Посещение по предварительной записи
Пн - ПТ: 11:00 - 19:00
Посещение по предварительной записи
Пн - ПТ: 11:00 - 19:00


Looi - Интерактивный робот компаньон с ИИ
Артикул:
Артикул:
Передовой гуманоидный робот, разработанный для исследовательских лабораторий, научных центров и университетов, специализирующихся на разработке и тестировании алгоритмов искусственного интеллекта и робототехники.
Доставка:

Доставим за 21 день

Покупай сейчас - плати потом

Гарантия - 3 месяцев
Цена по запросу
После оформления заказа наш менеджер свяжется с вами для уточнения деталей.

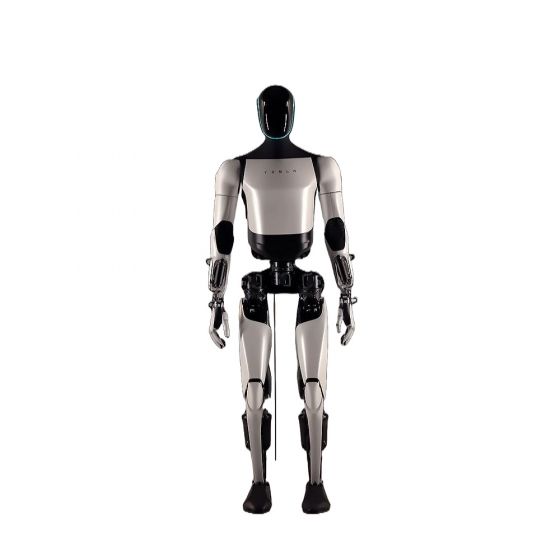
Agibot Agibot A2-W - Робот гуманоид – Описание
Agibot A2-W представляет собой передовой гуманоидный робот, разработанный для исследовательских лабораторий, научных центров и университетов, специализирующихся на разработке и тестировании алгоритмов искусственного интеллекта и робототехники. Этот функциональный робот выполнен в профессиональном исследовательском дизайне, сочетающем высокую модульность с превосходной функциональностью, что делает его идеальной платформой для экспериментов в области человекоподобной робототехники, машинного обучения и адаптивного поведения. Корпус изготовлен из высокотехнологичных композитных материалов с применением передовых методов 3D-печати и прецизионной механической обработки, обеспечивающих оптимальное соотношение прочности и веса при сохранении возможности быстрой модификации и кастомизации. A2-W имеет антропоморфную форму с биомиметическими пропорциями, оптимизированными для исследования человекоподобной локомоции и манипуляций, с детальной проработкой кинематических цепей для максимального соответствия биомеханике человека. В основе Agibot A2-W лежит открытая исследовательская вычислительная платформа с высокопроизводительными процессорами и специализированными нейроморфными чипами, оптимизированными для реализации сложных алгоритмов машинного обучения, нейронных сетей и систем компьютерного зрения в реальном времени. Робот оснащен передовой биомиметической системой артикуляции с 32 степенями свободы, включая полностью актуированные руки с тактильными сенсорами и антропоморфными захватами, способными воспроизводить сложные человеческие манипуляции, и динамически стабилизированную нижнюю часть тела для исследования двуногой локомоции в различных условиях. Специально разработанные высокоточные сервоприводы с сенсорами крутящего момента и положения обеспечивают как высокую точность позиционирования, так и возможность реализации алгоритмов силового контроля и податливого взаимодействия с окружающей средой. Agibot A2-W оборудован комплексной исследовательской сенсорной системой, включающей стереоскопические камеры высокого разрешения с глобальным затвором для точного восприятия трехмерного пространства, инерциальные измерительные модули в каждом суставе для отслеживания динамического состояния, распределенные тактильные сенсоры для исследования тактильного восприятия, микрофонные массивы для пространственной локализации источников звука, а также лидары и датчики глубины для построения детальных карт окружения. Робот передвигается на биомиметической двуногой локомоционной системе с активной стабилизацией, способной адаптироваться к различным типам поверхностей и преодолевать препятствия, что делает его идеальной платформой для исследования алгоритмов динамической ходьбы и баланса. Встроенная энергетическая система с высокоемкими литий-полимерными аккумуляторами обеспечивает до 3 часов автономной работы при активных экспериментах, с возможностью горячей замены батарей для продолжительных исследовательских сессий. Agibot A2-W поддерживает открытые исследовательские стандарты связи и протоколы передачи данных, что обеспечивает простую интеграцию с существующими лабораторными системами и исследовательским оборудованием. Программное обеспечение A2-W построено на открытой исследовательской платформе с полным доступом к исходному коду, включая низкоуровневые контроллеры для управления приводами, библиотеки компьютерного зрения и машинного обучения, фреймворки для разработки и тестирования новых алгоритмов, а также инструменты для сбора, визуализации и анализа экспериментальных данных. В комплект поставки входит робот, зарядная станция, набор запасных модулей и компонентов, комплект инструментов для модификации и обслуживания, программное обеспечение с открытым исходным кодом, документация API и SDK, руководство исследователя с описанием архитектуры и возможностей, а также доступ к исследовательскому сообществу Agibot с возможностью обмена опытом и результатами с другими лабораториями.

Двуручное взаимодействие с полным диапазоном действия
Бионические двойные руки с семью степенями свободы поддерживают параллельные и асинхронные операции, позволяя осуществлять передачу и управление в воздухе для легкой обработки сложных заготовок и определенных поз.
Полный привод с нулевым радиусом поворота и возможностью ходить крабом. Талия может подниматься и наклоняться, предлагая 22 степени свободы для полного покрытия рабочего пространства человека.
Полный привод с нулевым радиусом поворота и возможностью ходить крабом. Талия может подниматься и наклоняться, предлагая 22 степени свободы для полного покрытия рабочего пространства человека.

Эффективное развертывание и гибкая эксплуатация
Интегрированная конструкция шасси, вооружения и системы восприятия, обеспечивающая развертывание и ввод в эксплуатацию в течение одного дня.
Используя реализованные атомарные возможности, такие как UniGrasp, Uni6DPose и UniPlug, а также вычислительную мощность 275T, система достигает миллисекундного уровня распознавания объектов в реальном времени, оценки позы и принятия оперативных решений, динамически адаптируясь к гибким рабочим средам.
Благодаря обучению синтезу 3D-моделей в сочетании с обучением с подкреплением время адаптации к новым объектам можно сократить до нескольких часов.
Используя реализованные атомарные возможности, такие как UniGrasp, Uni6DPose и UniPlug, а также вычислительную мощность 275T, система достигает миллисекундного уровня распознавания объектов в реальном времени, оценки позы и принятия оперативных решений, динамически адаптируясь к гибким рабочим средам.
Благодаря обучению синтезу 3D-моделей в сочетании с обучением с подкреплением время адаптации к новым объектам можно сократить до нескольких часов.

Мультимодальное восприятие, гарантированная безопасность
Лидар 360°, 4 датчика искусственного интеллекта и 2 шестимерных датчика силы объединяются для обеспечения мультисенсорного восприятия, что позволяет обнаруживать препятствия на уровне миллисекунд и интеллектуально избегать их.
Система обнаружения столкновений руки, 360-градусное зондирование окружающей среды в режиме реального времени и избыточная конструкция восприятия и управления обеспечивают безопасность как для персонала, так и для окружающей среды.
Система обнаружения столкновений руки, 360-градусное зондирование окружающей среды в режиме реального времени и избыточная конструкция восприятия и управления обеспечивают безопасность как для персонала, так и для окружающей среды.
Ключевые возможности Робота гуманоида:
- Биомиметическая конструкция: Антропоморфная механика с 32 степенями свободы для исследования человекоподобных движений и манипуляций
- Открытая архитектура: Полный доступ ко всем уровням системы, от низкоуровневого управления приводами до высокоуровневых алгоритмов принятия решений
- Расширенная сенсорика: Комплексная система восприятия, включающая зрение, слух, осязание и проприоцепцию для мультимодального взаимодействия с окружающей средой
- Динамическая локомоция: Двуногая ходьба с активной стабилизацией для исследования алгоритмов баланса и адаптации к различным поверхностям
- Нейроморфные вычисления: Специализированные процессоры для реализации биологически инспирированных алгоритмов и нейронных сетей в реальном времени
- Модульность и кастомизация: Возможность быстрой замены и модификации компонентов для адаптации к различным исследовательским задачам
- Силовое взаимодействие: Сенсоры крутящего момента и алгоритмы податливого управления для безопасного и естественного взаимодействия с объектами и людьми
- Исследовательское ПО: Комплексный набор инструментов для разработки, тестирования и анализа алгоритмов робототехники и искусственного интеллекта
- Интеграция с ROS: Поддержка Robot Operating System для совместимости с широким спектром исследовательских инструментов и библиотек
- Сообщество разработчиков: Доступ к международному сообществу исследователей, работающих с платформой Agibot, для обмена опытом и коллаборации
163 см
высота робота
360°
зондирование
Около 230 кг
общая масса

Сферы применения:
Научные
исследования
Промышленная
автоматизация
Инспекция
и тех. обслуживание

Agibot Agibot A2-W - Робот гуманоид – Характеристики
Тип:
Робот гуманоид
Цвет:
Черный
Полезная нагрузка:
до 5 кг на одну руку
Высота:
163 см
Общая масса:
230 кг
Компания:
Agibot
Доставка из Китая
Если товар отправляется непосредственно из нашего офиса в Китае, время доставки составляет не менее 21 рабочего дня. Мы можем доставить его прямо к вам или получить в Москве и переотправить по всей России удобным для вас способом.
Самовывоз
В случае, если товар в наличии, вы можете забрать его самостоятельно с нашего склада, располагающемуся по адресу:
г. Москва, ул. Тушинская 17, ТЦ «Праздник»
г. Москва, ул. Тушинская 17, ТЦ «Праздник»
Доставка со склада в Москве
Для организации доставки по территории России и государствам СНГ мы сотрудничаем с проверенными перевозчиками. Расчет стоимости доставки производится нашим менеджером индивидуально после подтверждения заказа.
Agibot Agibot A2-W - Робот гуманоид – Доставка и оплата
р.
р.
Новостей пока что нет
Agibot Agibot A2-W - Робот гуманоид – Новости, статьи, обзоры
Оставьте заявку и мы перезвоним вам в течение 30 минут.
Нужна помощь?
